







बायाँ-हात नियम, दायाँ-हात नियम, दायाँ-हात पेंच नियम।बायाँ हात नियम, यो मोटर रोटेशन को बल को विश्लेषण को लागि आधार हो।सरल शब्दमा भन्नुपर्दा, यो चुम्बकीय क्षेत्रमा वर्तमान बोक्ने कन्डक्टर हो, जुन बलद्वारा प्रभावित हुनेछ।
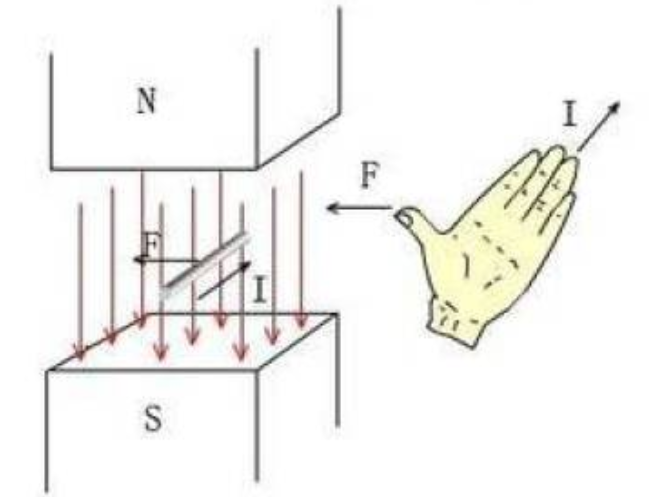
चुम्बकीय क्षेत्र रेखालाई हत्केलाको अगाडिबाट जान दिनुहोस्, औंलाहरूको दिशा प्रवाहको दिशा हो, र औंलाको दिशा चुम्बकीय बलको दिशा हो।बलको कर्षणले चुम्बकीय क्षेत्र रेखाहरूलाई इलेक्ट्रोमोटिभ बल उत्पन्न गर्न काट्छ।
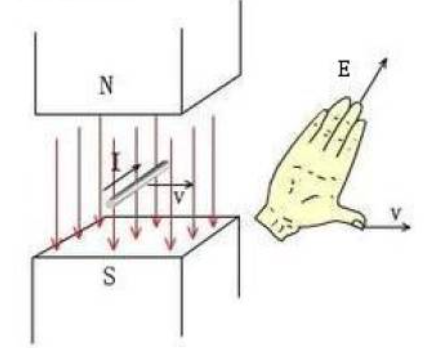
चुम्बकीय क्षेत्र रेखालाई हत्केलाबाट पार गर्न दिनुहोस्, औंलाको दिशा गतिको दिशा हो, र औंलाको दिशा उत्पन्न इलेक्ट्रोमोटिभ बलको दिशा हो।किन प्रेरित इलेक्ट्रोमोटिभ बल बारे कुरा?मलाई थाहा छैन यदि तपाइँसँग कुनै समान अनुभव छ भने।जब तपाईले मोटरको तीन-चरण तारहरू जोड्नुहुन्छ र हातले मोटर घुमाउनुहुन्छ, तपाईले देख्नुहुनेछ कि प्रतिरोध धेरै ठूलो छ।यो किनभने प्रेरणा मोटर को रोटेशन समयमा हुन्छ।इलेक्ट्रोमोटिभ बलले विद्युत् उत्पन्न गर्दछ, र चुम्बकीय क्षेत्रमा कन्डक्टर मार्फत प्रवाहित प्रवाहले घुमाउने दिशाको विपरीत बल उत्पन्न गर्दछ, र सबैले रोटेशनमा धेरै प्रतिरोध भएको महसुस गर्नेछन्।
तीन-चरण तारहरू अलग छन् र मोटर सजिलै घुमाउन सकिन्छ
तीन-चरण रेखाहरू संयुक्त छन्, र मोटरको प्रतिरोध धेरै ठूलो छ।दायाँ-हात स्क्रू नियम अनुसार, दाहिने हातले ऊर्जावान सोलेनोइडलाई समात्नुहोस्, ताकि चार औंलाहरू करेन्टको रूपमा उस्तै दिशामा झुकेका छन्, त्यसपछि औंलाले औंल्याएको अन्त एनर्जाइज्ड सोलेनोइडको एन पोल हो।
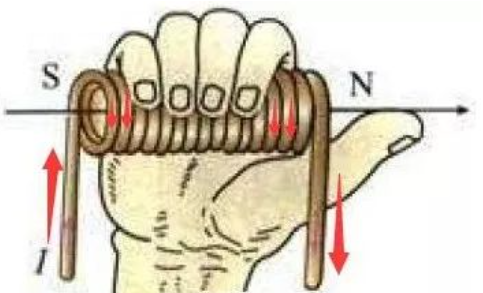
यो नियम ऊर्जावान कुण्डल को ध्रुवता न्याय को लागि आधार हो, र रातो तीर को दिशा वर्तमान दिशा हो।तीन नियमहरू पढिसकेपछि, मोटर घुमाउने आधारभूत सिद्धान्तहरू हेरौं।पहिलो भाग: DC मोटर मोडेल हामीले हाईस्कूल फिजिक्समा अध्ययन गरिएको DC मोटरको मोडेल फेला पार्छौं र चुम्बकीय सर्किट विश्लेषण विधि मार्फत सरल विश्लेषण गर्छौं।
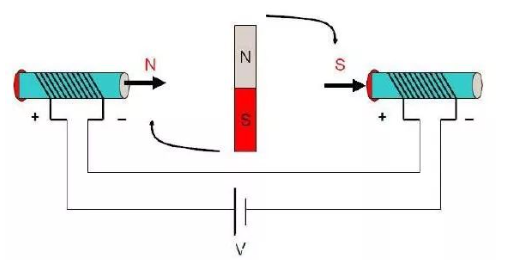
राज्य 1 जब दुवै छेउमा कुण्डलहरूमा करेन्ट लागू गरिन्छ, दाहिने हातको स्क्रू नियम अनुसार, लागू गरिएको चुम्बकीय इन्डक्सन तीव्रता B (मोटो तीरले देखाइएको रूपमा) उत्पन्न हुनेछ, र बीचमा रहेको रोटरले बनाउन प्रयास गर्नेछ। सम्भव भएसम्म यसको आन्तरिक चुम्बकीय प्रेरण रेखाको दिशा।बाहिरी चुम्बकीय क्षेत्र रेखाको दिशा सबैभन्दा छोटो बन्द चुम्बकीय क्षेत्र रेखा लूप बनाउन एकरूप हुन्छ, ताकि भित्री रोटर घडीको दिशामा घुम्नेछ।जब रोटर चुम्बकीय क्षेत्र को दिशा बाह्य चुम्बकीय क्षेत्र को दिशा को सीधा छ, रोटर को घूर्णन टोक़ सबै भन्दा ठूलो छ।ध्यान दिनुहोस् कि "क्षण" लाई सबैभन्दा ठूलो भनिन्छ, "बल" होइन।यो सत्य हो कि जब रोटरको चुम्बकीय क्षेत्र बाह्य चुम्बकीय क्षेत्र जस्तै दिशामा हुन्छ, रोटरमा चुम्बकीय बल सबैभन्दा ठूलो हुन्छ, तर यस समयमा रोटर तेर्सो अवस्थामा छ र बल हात ० छ, र अवश्य घुम्ने छैन।थप्नको लागि, क्षण बल र बल हातको उत्पादन हो।यदि तिनीहरू मध्ये एक शून्य छ भने, उत्पादन शून्य छ।जब रोटर तेर्सो स्थितिमा फर्कन्छ, यद्यपि यो अब घूर्णन टोक़बाट प्रभावित हुँदैन, यो जडताको कारण घडीको दिशामा घुम्न जारी रहनेछ।यस समयमा, यदि दुई solenoids को हालको दिशा परिवर्तन भयो भने, तलको चित्रमा देखाइए अनुसार, रोटर घुमाउन जारी रहनेछ।घडीको दिशामा अगाडि घुम्नुहोस्,
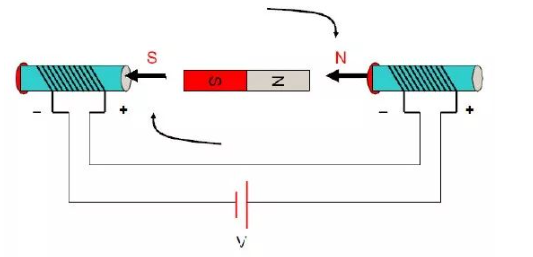
राज्य 2 मा, दुई solenoids को वर्तमान दिशा लगातार परिवर्तन हुन्छ, र भित्री रोटर घुमाउन जारी रहनेछ।धाराको दिशा परिवर्तन गर्ने यस कार्यलाई कम्युटेशन भनिन्छ।एक साइड नोट: कहिले कम्युट गर्ने भनेको रोटरको स्थितिसँग मात्र सम्बन्धित छ र सीधा कुनै अन्य मात्रासँग सम्बन्धित छैन।भाग २: तीन-चरण दुई-ध्रुव भित्री रोटर मोटर सामान्यतया, स्टेटरको तीन-चरण विन्डिङहरूमा तारा जडान मोड र डेल्टा जडान मोड हुन्छ, र "थ्री-फेज तारा जडानको दुई-दुई कन्डक्शन मोड" सबैभन्दा सामान्य हो। प्रयोग गरिएको छ, जुन यहाँ प्रयोग गरिएको छ।यो मोडेल एक साधारण विश्लेषण को लागी प्रयोग गरिन्छ।
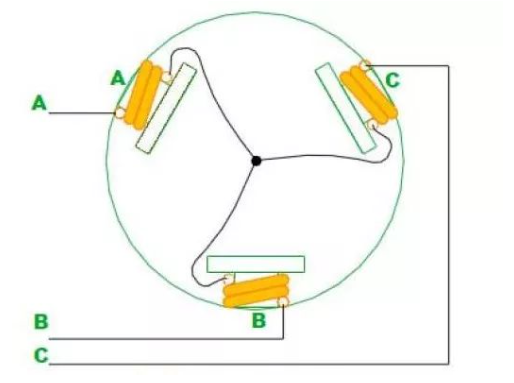
माथिको चित्रले स्टेटर विन्डिङहरू कसरी जोडिएको छ भनेर देखाउँछ (रोटरलाई काल्पनिक दुई-ध्रुव चुम्बकको रूपमा देखाइएको छैन), र तीनवटा विन्डिङहरू केन्द्रीय जडान बिन्दुमार्फत "Y" आकारमा एकसाथ जोडिएका छन्।पूरै मोटरले तीनवटा तार A, B, C तिर लैजान्छ। जब तिनीहरू दुई-दुईमा सक्रिय हुन्छन्, त्यहाँ 6 केसहरू हुन्छन्, AB, AC, BC, BA, CA, CB।ध्यान दिनुहोस् कि यो क्रम मा छ।
अब म पहिलो चरणमा हेर्छु: एबी चरण ऊर्जावान छ
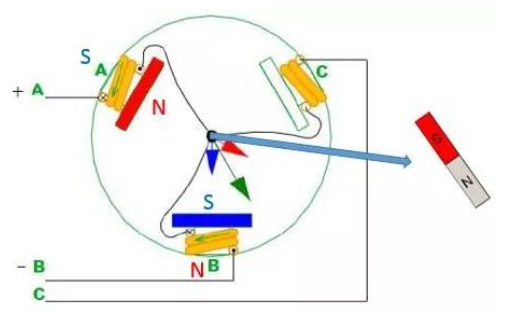
जब AB चरण सक्रिय हुन्छ, A ध्रुव कुण्डलले उत्पन्न गरेको चुम्बकीय क्षेत्र रेखाको दिशा रातो तीरद्वारा देखाइन्छ, र B पोलद्वारा उत्पन्न चुम्बकीय क्षेत्र रेखाको दिशा निलो तीरले देखाइन्छ, त्यसपछि दिशा नतिजाको बललाई हरियो एरोद्वारा देखाइएको छ, त्यसपछि त्यहाँ दुई-ध्रुव चुम्बक छ भनी मान्दै, N-ध्रुवको दिशा हरियो तीरले देखाइएको दिशासँग मेल खान्छ "बिचमा रहेको रोटरले राख्ने प्रयास गर्नेछ। यसको आन्तरिक चुम्बकीय क्षेत्र रेखाहरूको दिशा बाह्य चुम्बकीय क्षेत्र रेखाहरूको दिशासँग मेल खान्छ।सी को रूपमा, उहाँसँग अहिलेको लागि कुनै सम्बन्ध छैन।
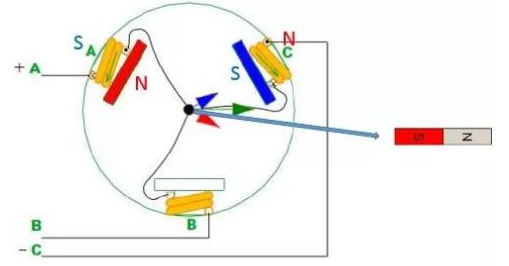
स्टेज २: एसी फेज एनर्जाइज्ड
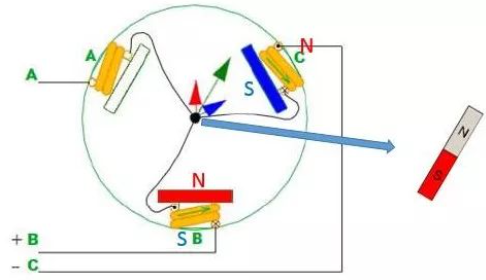
तेस्रो चरण: BC चरण विद्युतीकरण
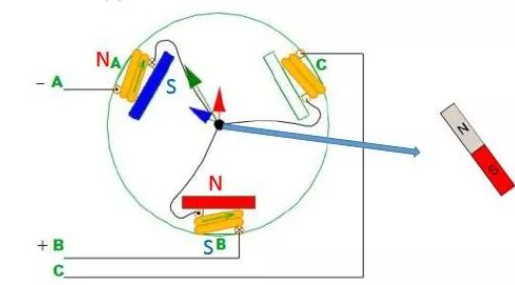
तेस्रो चरण: BA चरण ऊर्जावान छ
निम्न मध्यवर्ती चुम्बक (रोटर) को राज्य रेखाचित्र हो: प्रत्येक प्रक्रिया रोटर 60 डिग्री घुमाउँछ

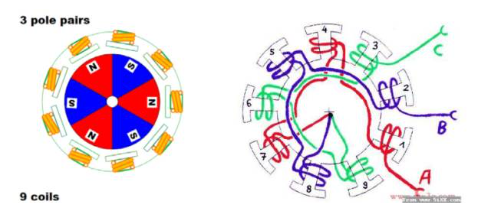
पूर्ण परिक्रमा छ प्रक्रियाहरूमा पूरा हुन्छ, जसमध्ये छवटा कम्युटेशनहरू गरिन्छ।तेस्रो भाग: तीन-चरण बहु-वाइन्ड बहु-पोल भित्री रोटर मोटर अझ जटिल बिन्दुमा हेरौं।चित्र (a) एक थ्री-फेज नाइन-वाइन्डिङ सिक्स-पोल (थ्री-फेज, नाइन-वाइन्डिङ, सिक्स-पोल) मोटर हो।विपरित ध्रुव) भित्री रोटर मोटर, यसको घुमाउरो जडान चित्र (b) मा देखाइएको छ।यो चित्र (b) बाट देख्न सकिन्छ कि तीन-चरण विन्डिङहरू मध्यवर्ती बिन्दुमा एकसाथ जोडिएका छन्, जुन तारा जडान पनि हो।सामान्यतया, मोटरको विन्डिङको संख्या स्थायी चुम्बक पोलहरूको संख्यासँग असंगत छ (उदाहरणका लागि, 6 विन्डिङ र 6 पोलको सट्टा 9 विन्डिङ र 6 पोलहरू प्रयोग गरिन्छ), ताकि स्टेटरको दाँत रोक्न र रोटरको चुम्बकहरू आकर्षित गर्न र पङ्क्तिबद्ध गर्नबाट।
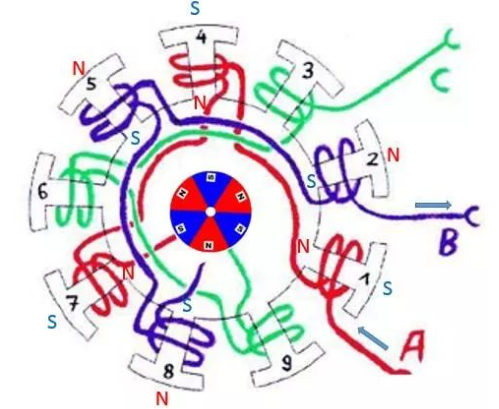
यसको गतिको सिद्धान्त हो: रोटरको N ध्रुव र ऊर्जावान वाइन्डिङको S ध्रुवमा पङ्क्तिबद्ध गर्ने प्रवृत्ति हुन्छ, र रोटरको S पोल र एनर्जिज्ड वाइन्डिङको N पोलमा पङ्क्तिबद्ध हुने प्रवृत्ति हुन्छ।अर्थात्, S र N एक अर्कालाई आकर्षित गर्दछ।ध्यान दिनुहोस् कि यो अघिल्लो विश्लेषण विधि भन्दा फरक छ।खैर, हामी तपाईंलाई यसलाई फेरि विश्लेषण गर्न मद्दत गरौं।पहिलो चरण: एबी चरण विद्युतीकृत छ
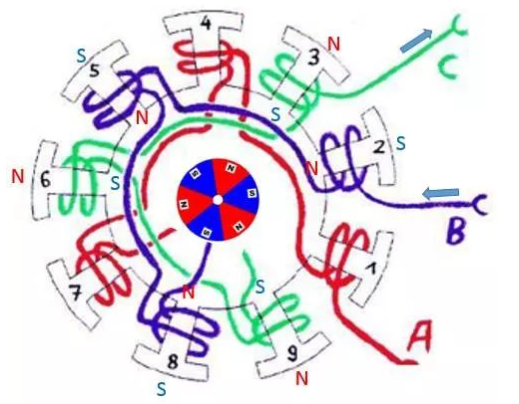
स्टेज २: एसी फेज एनर्जाइज्ड

तेस्रो चरण: BC चरण विद्युतीकरण
पोस्ट समय: अक्टोबर-21-2022